
|
|
|
|
Главная --> Промиздат --> Коэффициент поперечной деформации 133] ПРИМЕРЫ Полагаем теперь в формулах для Mi и Ms, что Рд =0 и ЛТз=0 и производим интегрирование: EJ 1 Рх\ dx + Ра- dx о о Padx + Pal Знак плюс показывает, что все перемещения направлены соответственгю по силам Р, Рд и Мд. Пример 91. Найти угол поворота 9 сечения С и горизонтальное перемещение А точки D копструкщп!, изображённой на фиг. 344. Фиг. 344. Для определения 6 и Д необходимо приложить в точке D горизонтальную добавочную силу Рд, а в сечении С добавочный момент Л1д. Определим реакции из условий статики: ЕА-О; Рд-Я = 0; Я=Рд; ЕГ = 0; -+D = 0; £) = Д; ЕМд = 0;М + Мд~О.2а + Рд.2. = 0; + А4д+Рд > 2а Изгибающие моменты и их производные: All = + Da4 = + § + Рдхг, dPj с/Л1д 2a ЛЬ = + (а + .2) + М = Рд(а + х,) + М; щ = 0; Горизонтальное перемещение точки D равно 2а а а 2а о .2а 3 2 Угол поворота сечения С равен 2а а \1 Ма 6 EJ* М (2аУ 2Ма SEJ 42 SEJ Найдём угол поворота б сечения С и горизонтальное перемещение А точки D той же конструкции, пользуясь теоремой Мора. Изобразим три 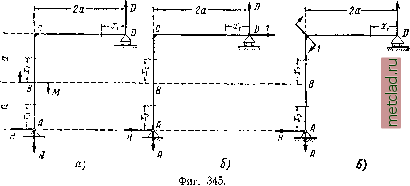 состояния загружения: а, б и в (фиг. 345). Определим реакции и изгибающие моменты для всех трёх состояний, показанных на фиг. 345: а) От заданной нагрузки: H = 0;D = ==A; Мх = + ~х М, = + М;М,=0. б) От единичной силы: Я = =1=Л; M; = + Xi; М9, = а + х; М1 + х. в) От единичного момента: § 133] ПРИМЕРЫ Вычислим деформации: а) и б) EJ 1 2а а а) и в) 2а а СМ Xi xldx+ \ M(a + X2)dx 2а а а MiMldx + { M2Mldx+ I M.Mtdx Мы получили те же выражения, что и при помощи теоремы Кастильяно. /И 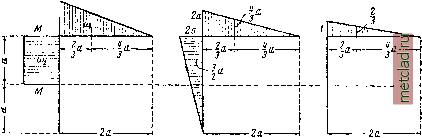 Фиг. 346. При решении этой же задачи способом Верещагина нужно для схем загружения а, б п в фиг. 345 построить эпюры изгибающего момента, что сделано на фиг. 346, и по ним определить: 1 = Ма; 2 = Ма; Wg == О (фиг. 346, а); (фиг. 346, б); Mci = 41 = сз = О (Фи!- 346, в). Искомые перемещения равны: 1 1 4 . 3 \ \7Ма Л==- Ма.-з-а + Ма .yй) = - 1 2 2 Ма |